Sout
The European Space Agency (ESA) has programmes underway to place Satellites carrying optical terminals in GEO orbit within the next decade. The first is the ARTEMIS technology demonstration satellite which carries both microwave and SILEX (Semiconductor Laser Intro satellite Link Experiment) optical interorbit communications terminal. SILEX employs direct detection and GaAIAs diode laser technology; the optical antenna is a 25cm diameter reflecting telescope. The SILEX GEO terminal is capable of receiving data modulated on to an incoming laser beam at a bit rate of 50 Mbps and is equipped with a high power beacon for initial link acquisition together with a low divergence (and unmodulated) beam which is tracked by the communicating partner. ARTEMIS will be followed by the operational European data relay system (EDRS) which is planned to have data relay Satellites (DRS). These will also carry SILEX optical data relay terminals.
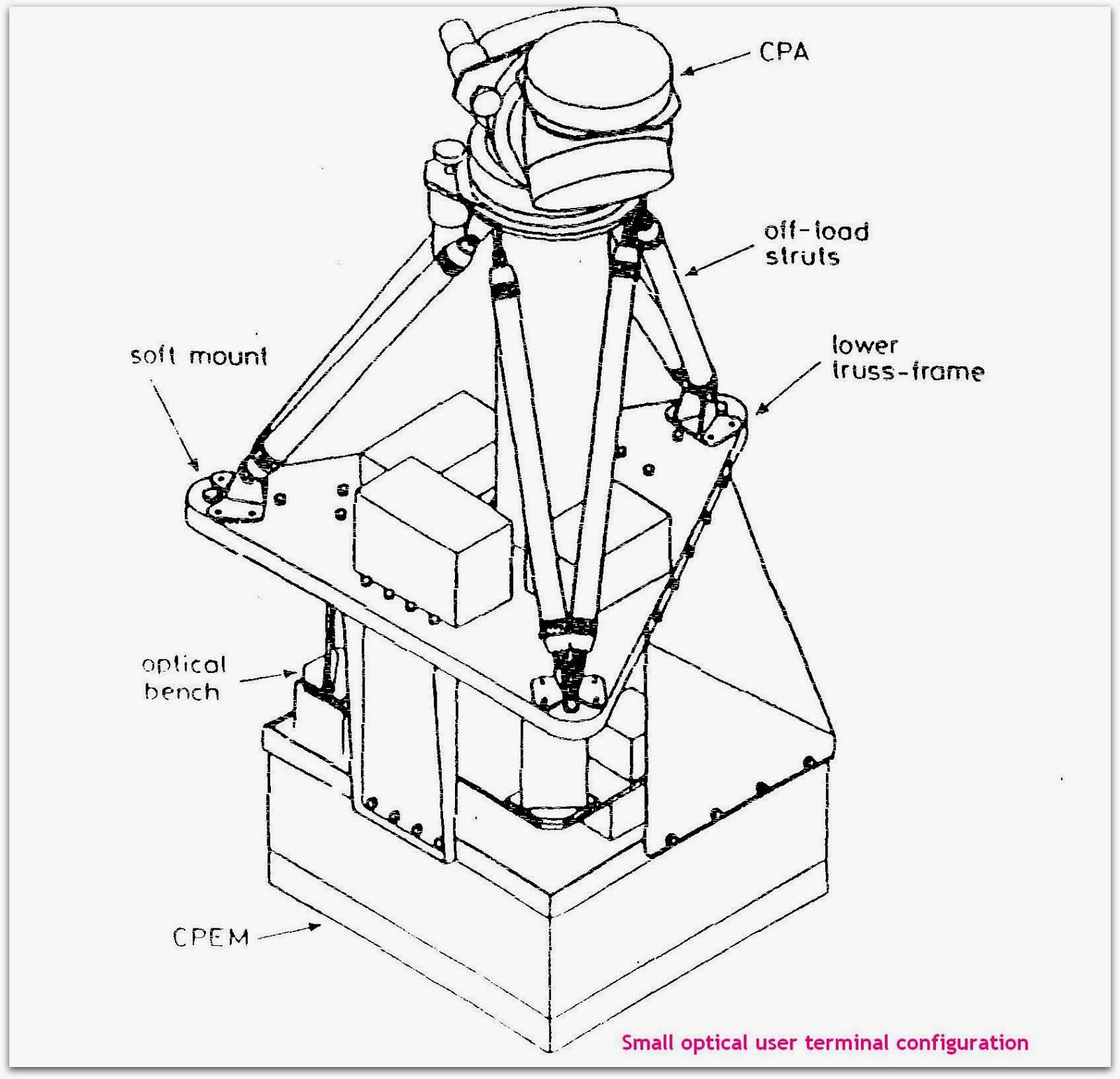
The terminal design which has been produced to meet these requirements includes a number of naval features principally, a periscopic coarse pointing mechanism (CPA) small refractive telescope, fibre coupled lasers and receivers, fibre based point ahead mechanism (PAA), anti vibration mount (soft mount) and combined acquisition and tracking sensor (ATDU). This combination has enabled a unique terminal design to be produced which is small and lightweight These features are described in the next sections.
Fine Pointing Loop
The fine pointing loop (FPL) is required to attenuate external pointing disturbances so that the residual mispoint angle is a small fraction of the optical beam width. The closed loop tracking subsystem consists of a tracking sensor which determines the direction of the incoming communications beam with an angular resolution around 5% of the optical beam width and a fine pointing mirror assembly (FPA) which compensates beam mispointing effects. The SOUT FPL is used to compensate for frequencies upto 80 HZ.
Optical Antenna
The optical antenna comprises the telescope and coarse pointing assembly. The telescope is a refractive keplerian design which does not have the secondary mirror obscurration loss associated with reflective systems. The CPA uses stepping motors together with a conventional spur gear and planetary gear. The total height of the optical antenna is a major contributor to the height of the CPA above the platform which affects LEO and GEO link obscurration by solar arrays, antennas and other space craft appendages.
General optical terminal
In this system a nested pair of mechanism which perform the course pointing and fine pointing functions is used. The former is the coarse pointing assembly (CPA) and has a large angular range but a small band width while the latter, the fine pointing assembly (EPA) has a small angular range and large band width. These form elements of control loops in conjuction with acquisition and tracking sensors which detect the line of sight of the incoming optical beam. A separate point ahead mechanism associated with the transmitter sub system carries out the dual functions of point ahead and internal optical allignment.
Abstract
Satellite crosslinks generally require narrower bandwidths for increased power concentration. We can increase the power concentration by increasing the cross link frequency with the same size antenna. But the source technology and the modulation hardware required at these higher frequency bands are still in the development stage. Use of optical frequencies will help to overcome this problem with the availability of feasible light sources and the existence of efficient optical modulation communications links with optical beams are presently being given serious considerations in intersatellite links.
Introduction
Communication links between space crafts is an important element of space infrastructure, particularly where such links allow a major reduction in the number of earth stations needed to service the system.
Conclusion
Optical intersatellite communications promises to become an important element in future space infrastructure and considerable development effort is currently underway in Europe and elsewhere. There will be a need for small optical terminals for LEO space craft once Europe’s data relay satellites are in orbit within the next five years. The small official user terminal (SOUT) programme funded by ESA seeks to fill this need for data rate around 2Mbps.