Artificial Intelligence Methods
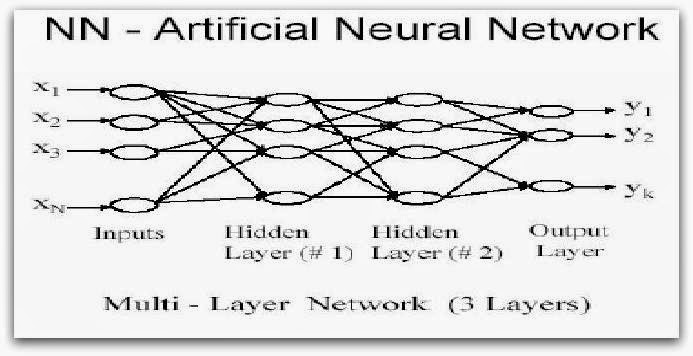
Artificial intelligence is a vast, loosely defined area encompassing various aspects of pattern recognition and image processing, natural language and speech processing, automated reasoning and a host of other disciplines. Fuzzy logic and neural network are two of the most widely used approaches in artificial intelligence methods for combining multisensor data. Fuzzy logic involves extension of Boolean set theory and Boolean logic to a continuous-valued logic via the concept of membership functions to quantify imprecise concepts. Neural network is a method designed to mimic a theory of how biological nervous systems work.
About
The oceans cover 70% of the Earth's surface and contain an abundance of living and nonliving resources that remain largely untapped waiting to be discovered. However, a number of complex issues, mainly caused by the nature of underwater environments, make exploration and protection of these resources difficult to perform. In the past few decades, various world-wide research and development activities in underwater robotic systems have increased in order to meet this challenge. Extensive use of ROVs is currently limited to a few applications because of very high operational costs and the need for human presence in conducting a mission. The demand for a more sophisticated underwater robotic technology that minimizes the cost and eliminates the need for human operator and is therefore capable of operating autonomously becomes apparent. These requirements led to the development of Autonomous Underwater Vehicles (AUVs). A key problem with autonomous underwater vehicles is being able to navigate in a generally unknown environment.

Multisensor Data Fusion
It is clear from the previous discussion that information from sensors used in one navigation system need to be combined or fused with information from sensors of other navigation systems to improve the overall accuracy of the system. T o achieve this MSDF techniques, which combine data from multiple sensors and related information from associated databases can be used.
Optical Navigation
In the context of optical imaging for navigation, the underwater environment is a very special place. The reason for this is that, in addition to visual-sensing issues that must be addressed in land and space-based vehicles, there are also issues specific to underwater imaging. These issues include limited range of visibility, brightness and contrast variation, and non-uniform illumination. Limited range of visibility is caused by the attenuation of light in water by absorption and scattering by suspended matter. Light absorption and scattering cause the amount of reflected light to exponentially decay as a function of distance to scene surfaces.
Dead Reckoning Navigation
Dead reckoning is a mathematical means to determine position estimates when the vehicle starts from a known point and moves at known velocities, the present position is equal to the time integral of the velocity. Measurement of the vector velocity components of the vehicle is usually accomplished with a compass (to obtain direction) and a water speed sensor.
Radio Navigation
Radio navigation systems mainly use the Global Positioning System (GPS). The GPS is a satellite-based navigational system that provides the most accurate open ocean navigation available. GPS consists of a constellation of 24 satellites that orbit the earth in 12 hours. The GPS based navigation system is used extensively in surface vessels as these vehicles can directly receive signals radiated by the GPS. Unfortunately, these signals have a limited water-penetrating capability. Therefore to receive the signals, an antenna associated with an AUV employing a GPS system must be clear and free of water. There are three possible antenna configurations to meet this requirement.
Conclusion
It has been suggested in this paper, from the various examples given in AUV navigation, that information coming from a single navigation system is not sufficient to provide a good navigation capability. Therefore MSDF techniques which combine sensory information from other navigation systems to improve the navigation capability is essential.